Work on Big Data Analytics and Urban Computing
Category : Research
I have worked on big data analytics for different transportation-related topics. Here is a list of publications in this field.
- Xiao-Feng Xie and Zun-Jing Wang. Examining travel patterns and characteristics in a bikesharing network and implications for data-driven decision supports: Case study in the Washington DC area. Journal of Transport Geography, 71: 84-102, 2018.
![[PDF]](http://www.wiomax.com/team/xie/wp-content/plugins/papercite/img/pdf.png)
![[DOI]](http://www.wiomax.com/team/xie/wp-content/plugins/papercite/img/doi.png)
![[Bibtex]](http://www.wiomax.com/team/xie/wp-content/plugins/papercite/img/bib.png)
@Article{Xie2018Bike, Title = {Examining travel patterns and characteristics in a bikesharing network and implications for data-driven decision supports: Case study in the {Washington DC} area}, Author = {Xiao-Feng Xie and Zun-Jing Wang}, Journal = {Journal of Transport Geography}, Volume = {71}, Pages = {84--102}, PDF={http://www.wiomax.com/team/xie/paper/JTRG18Pre.pdf}, Doi = {10.1016/j.jtrangeo.2018.07.010}, Year = {2018} } - Xiao-Feng Xie and Zun-Jing Wang. Multiscale crash analysis: A case study of integrating FARS, Maryland’s crash data, and Montgomery County’s traffic violation data. In Transportation Research Board (TRB) Annual Meeting, number 18-2283, Washington, DC, 2018.
![[DOI]](http://www.wiomax.com/team/xie/wp-content/plugins/papercite/img/lnk.png)
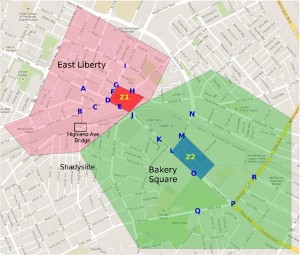
@InProceedings{xie2018multiscale, title={Multiscale crash analysis: A case study of integrating {FARS}, {Maryland}'s crash data, and {Montgomery County}'s traffic violation data}, author={Xie, Xiao-Feng and Wang, Zun-Jing}, Booktitle = {Transportation Research Board (TRB) Annual Meeting}, number={18-2283}, Address = {Washington, DC}, LNK={https://trid.trb.org/View/1495254}, PDF={http://www.wiomax.com/team/xie/paper/TRB18.pdf}, year={2018} } - Yiming Gu, Zhen Qian, and Xiao-Feng Xie. An unsupervised learning approach for analyzing traffic impacts under arterial road closures: Case study of East Liberty in Pittsburgh. Journal of Transportation Engineering, 142(9): 4016033, 2016.
@Article{Gu2016, Title = {An unsupervised learning approach for analyzing traffic impacts under arterial road closures: Case study of {East Liberty} in {Pittsburgh}}, Author = {Yiming Gu and Zhen Qian and Xiao-Feng Xie}, journal = {Journal of Transportation Engineering}, Year = {2016}, Number = {9}, Volume = {142}, Pages = {04016033}, Doi={10.1061/(ASCE)TE.1943-5436.0000860}, publisher={American Society of Civil Engineers} } - Xiao-Feng Xie and Zun-Jing Wang. An empirical study of combining participatory and physical sensing to better understand and improve urban mobility networks. In Transportation Research Board (TRB) Annual Meeting, number 3238, Washington, DC, 2015.
![[PPT]](http://www.wiomax.com/team/xie/wp-content/plugins/papercite/img/ppt.png)
@InProceedings{Xie2015, Title = {An empirical study of combining participatory and physical sensing to better understand and improve urban mobility networks}, Author = {Xiao-Feng Xie and Zun-Jing Wang}, Booktitle = {{Transportation Research Board (TRB) Annual Meeting}}, number={3238}, PDF={http://www.wiomax.com/team/xie/paper/TRB15LBSN.pdf}, PPT={http://www.wiomax.com/team/xie/demo/TRB15_demo_BigData_UrbanInformatics.pdf}, LNK={https://trid.trb.org/View/1337999}, Year = {2015}, Address = {Washington, DC} }
- X. Xie and Z. J. Wang, “Uncovering Urban Mobility and City Dynamics from Large-Scale Taxi Origin-Destination (O-D) Trips: Case Study in Washington DC Area,” WIOMAX, WIO-TR-18-003, 2018.
@TechReport{xie2018uncovering, title = {Uncovering Urban Mobility and City Dynamics from Large-Scale Taxi Origin-Destination ({O-D}) Trips: Case Study in {Washington DC} Area}, author = {Xiao-Feng Xie and Wang, Zunjing Jenipher}, year = {2018}, number = {WIO-TR-18-003}, Institution={WIOMAX}, PDF = {http://www.wiomax.com/doc/report/WIO-TR-18-003.pdf}, DOI = {10.13140/RG.2.2.32170.72644}, urldate = {2018-07-25}, upddate = {2018-07-25} }
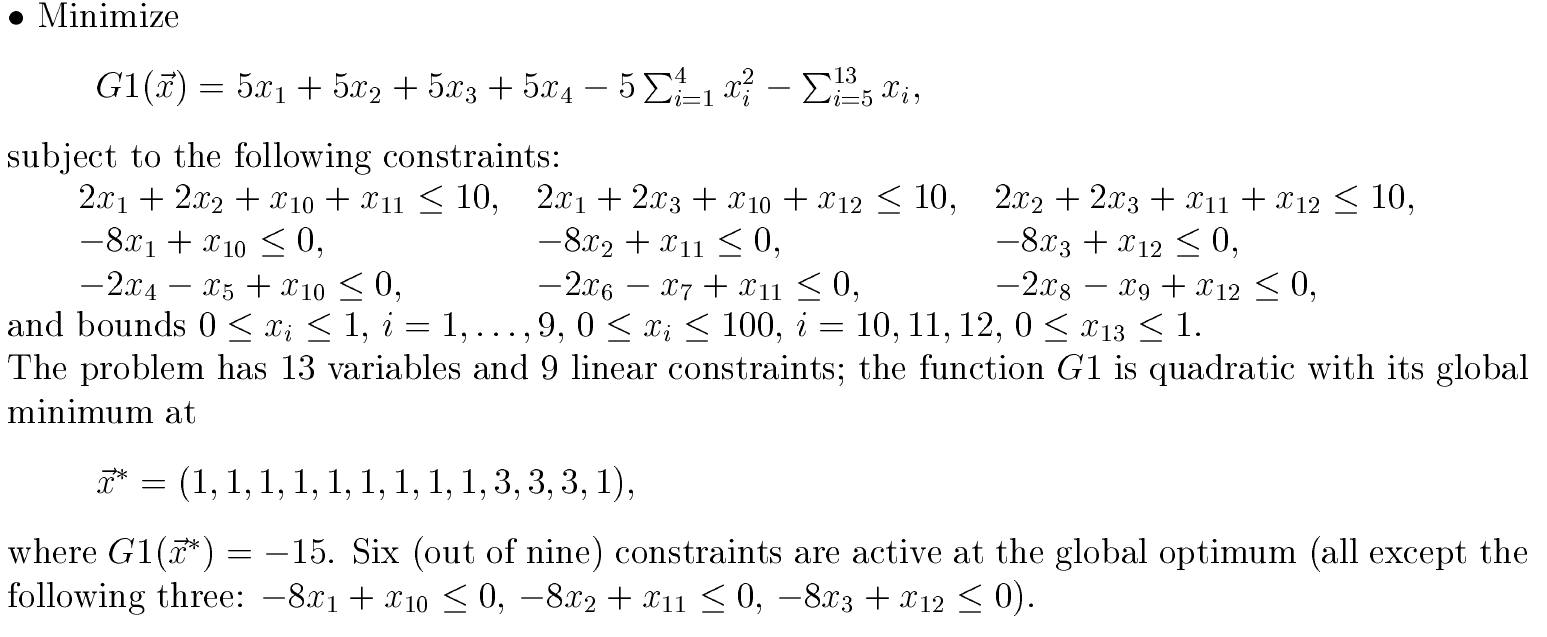
![\begin{array}{rcll} \min &~& f(\mathbf{x}) & \\ \mathrm{subject~to} &~& g_i(\mathbf{x}) =\in [c_i, d_i] &\text{for } i=1,\ldots,n \end{array}](http://s0.wp.com/latex.php?latex=%5Cbegin%7Barray%7D%7Brcll%7D+%5Cmin+%26%7E%26+f%28%5Cmathbf%7Bx%7D%29+%26+%5C%5C+%5Cmathrm%7Bsubject%7Eto%7D+%26%7E%26+g_i%28%5Cmathbf%7Bx%7D%29+%3D%5Cin+%5Bc_i%2C+d_i%5D+%26%5Ctext%7Bfor+%7D+i%3D1%2C%5Cldots%2Cn+%5Cend%7Barray%7D&bg=ffffff&fg=000000&s=0 "\begin{array}{rcll} \min &~& f(\mathbf{x}) & \\ \mathrm{subject~to} &~& g_i(\mathbf{x}) =\in [c_i, d_i] &\text{for } i=1,\ldots,n \end{array}")
") is the objective function and each
is the objective function and each ") is a constraint function to be satisfied, and
is a constraint function to be satisfied, and  and
and  are constants. Each function can be nonlinear and non-smooth. If there is no constraint (i.e.,
are constants. Each function can be nonlinear and non-smooth. If there is no constraint (i.e.,  ), then the problem becomes an unconstrained optimization problem.
), then the problem becomes an unconstrained optimization problem.