 Traffic congestion significantly degrades the quality of life in urban environments. It results in lost time, wasted fuel resources and reduced air quality for urban residents. Recent work in real-time, schedule-driven control of traffic signal networks has introduced new possibilities for reducing congestion in urban environments. However so far, this work has focused mainly on achieving more efficient vehicle flows and on reducing emissions, and the broader mobility of other modes of traffic that are central to sustainable urban living – especially pedestrians – has not been emphasized in an integrated way.
Traffic congestion significantly degrades the quality of life in urban environments. It results in lost time, wasted fuel resources and reduced air quality for urban residents. Recent work in real-time, schedule-driven control of traffic signal networks has introduced new possibilities for reducing congestion in urban environments. However so far, this work has focused mainly on achieving more efficient vehicle flows and on reducing emissions, and the broader mobility of other modes of traffic that are central to sustainable urban living – especially pedestrians – has not been emphasized in an integrated way.
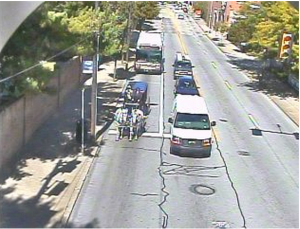
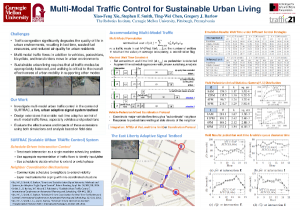
We extend this decentralized, schedule-driven approach to traffic network control in the direction of sustainable urban mobility. We focus specifically on accommodating the safety and optimizing the delay tradeoffs between multiple traffic modes (vehicles, buses and pedestrians). Some basic extensions are introduced and evaluated on a real-world road network. Simulation results are first presented which analyze the ability of the extended approach to achieve good delay tradeoffs under different traffic conditions. Tests are then performed in the field at selected intersections of the target road network, to demonstrate the effectiveness of the approach in operation.
Complementary analysis with an extension to the adaptive traffic signal control system showed that if one assumes an ability to detect buses stopped and blocking traffic in real-time, then it is possible to achieve a non-trivial improvement in vehicle travel times by servicing cross traffic without compromising bus throughput.
- “Coping with real-world challenges in real-time urban traffic control,” in Transportation Research Board (TRB) Annual Meeting, Washington, DC, 2014.
![[PDF]](http://www.wiomax.com/wp-content/plugins/papercite/img/pdf.png)
![[PPT]](http://www.wiomax.com/wp-content/plugins/papercite/img/ppt.png)
![[DOI]](http://www.wiomax.com/wp-content/plugins/papercite/img/lnk.png)
![[Bibtex]](http://www.wiomax.com/wp-content/plugins/papercite/img/bib.png)
@InProceedings{Xie2014a, Title = {Coping with real-world challenges in real-time urban traffic control}, Author = {Xiao-Feng Xie and S. Smith and G. Barlow and Ting-Wei Chen}, Booktitle = {Transportation Research Board (TRB) Annual Meeting}, Year = {2014}, number={14-2103}, PDF={http://www.wiomax.com/team/xie/paper/TRB14UTC.pdf}, PPT={http://www.wiomax.com/team/xie/demo/TRB14_demo_Surtrac_Uncertainty.pdf}, LNK={https://trid.trb.org/View/1288134}, Address = {Washington, DC} } - “Real-time traffic control for sustainable urban living,” in IEEE International Conference on Intelligent Transportation Systems, Qingdao, China, 2014.
![[Video]](http://www.wiomax.com/wp-content/plugins/papercite/img/vid.png)
![[DOI]](http://www.wiomax.com/wp-content/plugins/papercite/img/doi.png)
@InProceedings{Xie2014ITSC, Title = {Real-time traffic control for sustainable urban living}, Author = {Xiao-Feng Xie and S. Smith and Ting-Wei Chen and G. Barlow}, Booktitle = {IEEE International Conference on Intelligent Transportation Systems}, Address = {Qingdao, China}, Year = {2014}, PDF = {http://www.wiomax.com/team/xie/paper/ITSC14.pdf}, PPT={http://www.wiomax.com/team/xie/demo/ITSC14_demo_MMTC.pdf}, VID={https://www.youtube.com/watch?v=UBu6QtNiJVY}, DOI={10.1109/ITSC.2014.6957964}, Pages = {1863-1868} } - “Schedule-driven intersection control,” Transportation Research Part C, vol. 24, 2012.
@Article{Xie2012, Title = {Schedule-driven intersection control}, Author = {Xiao-Feng Xie and S. Smith and Liang Lu and G. Barlow}, Journal = {Transportation Research Part C}, Year = {2012}, Pages = {168-189}, Volume = {24}, PDF={http://www.wiomax.com/team/xie/paper/TRC12.pdf}, Doi = {10.1016/j.trc.2012.03.004} }